Nueva misión del buque científico André Malraux sobre el pecio de la fragata Lune, hundida en 1664, para probar la capacidad del Ocean One, un robot humanoide diseñado en Stanford, para los trabajos arqueológicos en profundidad
A bordo del André Malraux, 12 y 13 de abril de 2016
Cubierto con una lona que apenas disimula su forma humanoide, amarrado sobre la cubierta del buque científico André Malraux, de la agencia francesa de arqueología subacuática (Drassm), viaja el Ocean One. Es el último robot diseñado por uno de los más afamados expertos del mundo: Oussama Khatib, cuyo laboratorio está en la Universidad de Stanford (Estados Unidos). El objetivo de esta misión a pocas millas de Tolón -que tuvo lugar a mediados de abril y a la que fue invitado ABC-, es probar las habilidades de esta singular máquina con rostro humano -primera de su género- a casi cien metros bajo la superficie. Y lo hará realizando delicadas labores de arqueología sobre los restos de la fragata Lune, hundida en 1664 y convertida desde hace años en un laboratorio de pruebas para crear la metodología de una nueva era de arqueología en profundidad. Una estrategia tecnológica impulsada por el director del proyecto y de la Drassm, Michel L’Hour. Los resultados de este gran avance se presentarán hoy en Francia.
Michel L’Hour y Oussama Khatib en el puente de mando del André Malraux
El equipo multidisciplinar que acompaña al Ocean One en su primer viaje a la Lune está formado por una veintena de arqueólogos y expertos en robótica, a los que se suma la tripulación del buque. Llenan la sala de control alrededor de una mesa repleta de pantallas, ordenadores y los terminales hápticos que permiten al piloto del robot sentir a través del tacto la resistencia que las manos del Ocean One encuentran en los objetos que manipula.
Tres vehículos en el abismo
Dos vehículos remotos descenderán hacia el abismo marino junto al Ocean One, hasta los 91 metros, en los que se sitúa este pecio. Tres pilotos (uno por cada vehículo) marcan profundidades y coordinan sus movimientos, mientras el resto asiste por las pantallas al desarrollo de las gráficas o mira en el monitor el abismo marino que se tragó la fragata del Rey Sol. En la penumbra aparecen fantasmales los cañones y objetos de los marineros que descansa en este cementerio marino.
Vincent Creuze, del Laboratorio de Informática, Robótica y Microelectrónica de la Universidad de Montpelier (el Lirmm) coordina la operación que involucra al Perseo, un ROV de clase 2 diseñado para trabajar a 600 metros, y al Leonard, un pequeño y muy versátil aparato construido por el propio Creuze y que será quien guíe al Ocean One hacia el punto excacto donde le esperan más de tres siglos de historia. Es un viaje al pasado y al futuro al mismo tiempo.
Pero es el primer viaje del Ocean One fuera de la piscina de la Universidad de Stanford donde fue creado. Es el prototipo de la más avanzada robótica aplicada a entornos hostiles. Los robots de Khatib son «human friendly», como nos dice, siempre sonriente, y están destinados a ayudar a operadores humanos donde el riesgo es mayor: entornos radiactivos, geológicamente inestables, el fondo del mar, las minas, los polos… «El hombre pone su cerebro y su destreza y el robot, el trabajo». Bajo 90 metros de agua la presión, la temperatura y las corrientes ponen a prueba la pericia del equipo de seis personas, incluido un piloto especializado. Los mandos hápticos permiten que las manos del piloto sientan con los sensores del robot.
“Tenemos un problema”
Toda misión de gran complejidad se enfrenta a problemas, y este viaje a la Lune no será una excepción. El piloto del robot, Gerald Brantner, acaba fuera de combate por un problema en los oídos que el movimiento del barco agrava. Le suple otro miembro del Stanford Robotics Lab, Brian Soe. Hay tensión en el ambiente. El equipo vive la inmersión con la sensación de asisitir a un momento único.
El director del proyecto, Michel L’Hour, lo ratifica efusivamente: «Aquí comienza una nueva era para la arqueología subacuática. Y nosotros estamos viendo hoy este momento histórico». La agencia francesa mantiene desde 1993 -fecha en la que fue descubierto el pecio de la Lune- una estrategia global encaminada a desarrollar los mejores estándares científicos en excavaciones más allá del límite en el que el buceo de arqueólogos es aconsejable. Y después de años de trabajo, esta asociación con Stanford supone un salto, porque esta tecnología guiada por el hombre, que recibe las sensaciones de la máquina, sí permitirá un trabajo delicado sobre los yacimientos. Es robot tiene controles similares a los que se emplean en cirugía, pero mucho más complejo por los movimientos implicados en la navegación y la presión. Un trabajo así está en las antípodas de quienes se limitan a excavarlos pecios para extraer los restos, sea o no para su venta.
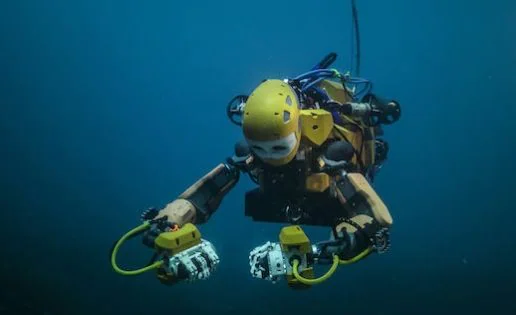
El robot Ocean One desciende a las profundidades guiado por el ROV Leonard (FOTO Teddy Seguin)
El cambio de piloto introduce un vector inesperado que el equipo de Khatib asume con gran espíritu. El Perseo llega primero al fondo y sus focos abren en las tinieblas una cúpula de luz. Desde la cámara del Leonard, el último en bajar, contemplamos el lento descenso del humanoide Ocean One hacia las tinieblas, hasta que debajo aparece tenuemente primero y después con más fuerza, el pecio iluminado por el Perseo. El robot probado en la piscina de una Universidad ha superado la inmersión para la que fue diseñado. Suspiros de satisfacción desatan la tensión vivida, pero la concentración continúa.
Finalmente, el robot surge en las pantallas en el punto exacto previsto. Ahora sí, viendo al robot con sus ojos abiertos moverse entre los cañones de hace 350 años, el viaje en el tiempo se completa. El futuro contempla un lugar del pasado. Funciones a pleno rendimiento.
El Ocean One manipula un objeto de cerámica en el pecio de la Lune (FOTO Teddy Seguin)
La imagen es preciosa, el robot aparece entre dos cañones de hierro llenos de concreciones y se dirige al pie de uno de ellos. La misión consiste en manipular objetos. Aquí los cambios juegan una mala pasada al equipo. El Ocean One muestra dificultades para mantener un pote de cerámica en las manos. Un parámetro de fuerza de las manos no del todo ajustado tiene la culpa. Después el robot acude a otro punto del pecio y lo intenta, con algo más de acierto. Khatib se muestra satisfecho por cómo la estructura ha aguantado la presión. Pese al pequeño problema con la fuerza de las manos, ha sido un gran éxito.
Así funciona el robot
El desarrollo específico del Ocean One ha costado tres millones de dólares, pero no habría sido posible sin los años previos de investigación de Khatib en Stanford. Ocean One tiene, en la jerga robótica, 24 grados de libertad, es decir 24 lugares en los que se puede aplicar torsión o permiten navegar. Tiene 7 en cada brazo más dos en las manos, 6 en el cuerpo y dos más en la cabeza. Le permiten los movimientos más precisos en el agua.
La misión del robot en la Lune es un pequeño paso pero permitirá un gran salto: la investigación completa de los restos de la sociedad francesa del XVII que quedaron atrapados en el naufragio y esperan a los arqueólogos para mostrarles -como nunca antes- cómo era la vida, cómo vestían, que utensilios embarcaban, como se armaban, tanto los nobles como los grumetes.
Su destino está en las manos prensiles del Ocean One, en sus circuitos fluyen algoritmos matemáticos que mueven los engranajes adaptados con un circuito de aceite que compensa la enorme presión bajo el mar. Un paso más allá de los límites hasta ahora alcanzados o soñados por la arqueología. Miles de pecios quedan al alcance y podrán ser investigados como merecen, con los más altos estándares científicos.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}