
Así se ha construido el Ocean One, el nuevo prototipo de robot que puede realizar tareas arqueológicas hasta a mil metros de profundidad y que ha sido probado con éxito en Tolón
“Los robots van a necesitar ayuda del operador humano por muchos años. Hasta ahora los científicos hemos diseñado en nuestros laboratorios robots para lugares con ambiente estable y controlado, robots que podríamos llamar de interior. Pero nosotros estamos desarrollando ahora otro tipo de robots, capaces de acudir a entornos muy hostiles y hacer bien su trabajo“. Quien habla es Oussama Khatib, el gurú mundial de la robótica que dirige el Stanford Robótics Lab en Estados Unidos. Es el creador del Ocean One, el robot recién probado en Francia que ha roto los límites de la arqueología subacuática después de cuatro años de trabajo y un presupuesto de tres millones de dólares.

Acaba de hacer su viaje inaugural cerca de Tolón. A bordo del André Malraux, el buque científico de la agencia francesa (Departamento de investigaciones arqueológicas subacuáticias y submarinas, DRASSM), Espejo de Navegantes pudo compartir la experiencia con el equipo que ha creado esta máquina destinada a reemplazar al operador humano en misiones de riesgo y ha abierto una nueva era de la arqueología a gran profundidad. (Ver aquí el corto documental sobre este viaje inaugural)
En el laboratorio de Robótica de Stanford, el equipo de Oussama Khatib trabaja en varios proyectos que están en los límites de lo que los robots son capaces de hacer hoy. A bordo del André Malraux, Khatib nos mostró esos avances. Siempre sonriente, dirige en este viaje a un grupo de seis personas que despliegan sus habilidades con una coordinación y rapidez envidiable. Son un gran equipo. Han venido a Francia a sobrevolar la Luna, o los restos de la fragata Luna, hundida en 1664, que yacen a 91 metros de profundidad, a 5 millas de la costa.
Khatib explica que el Ocean One no sería posible sin los descubrimientos realizados durante la última década, relativos al control de la fuerza y el aprendizaje del movimiento humano que le han permitido poner en marcha una serie de proyectos como el Ocean One. “Queremos retirar a los operadores humanos de lugares peligrosos -afirma Khatib, mientras nos enseña una presentación de sus avances más recientes-. Un entorno radiactivo, como ocurrió en Fukushima, o una mina, donde los trabajadores asumen grandes riesgos. En estaciones polares o de alta montaña. Queremos ayudar a los geólogos, a los astronautas, a los oceanógrafos, a realizar trabajos altamente especializados con ayuda de los robots“.

El medio para lograr ese objetivo es la tecnología, en concreto la terminal de doble retroalimentación háptica, que permite al piloto de esta máquina sofisticada sentir en sus manos la interacción del robot con los objetos que le rodean. Es como un avatar, que transfiere sensaciones, sobre todo las tactiles, al operador humano a distancia y que se mueve con gran precisión. Además de la interface háptica, otros principios rigen las destrezas del prototipo Ocean One: primero, el Whole body control, que mejora la interacción con un movimiento adaptativo-pasivo que hace posible los trabajos, por ejemplo después de alargar un brazo para operar con algún objeto, el cuerpo acompaña el movimiento para volver a la posición de trabajo automáticamente.
Es lo mismo que hacemos los humanos, en la búsqueda de la mayor eficiencia en nuestros movimientos. Además la locomoción basada en contacto, que permite al robot decidir la mejor navegación para el movimiento que le pide su operador. Por último, el control de fuerza multicontacto, ideal para el trabajo con humanos, porque permite al robot tomar decisiones instantáneas para no dañar aplicando excesiva fuerza ni un objeto delicado ni, por supuesto, la persona a la que ayuda.
No todo es cuestión de programación, según nos explica. De hecho, Khatib afirma que “la programación está bien, pero ¿cuánto hay que programar para que un dedo ejerza la presión exacta, para que el brazo reaccione a un golpe o un cambio brusco en el entorno sin modificar la presión y la fuerza que ejerce, incluso sin resultar peligroso para su compañero humano? De eso se trata. Programar para realizar una rutina en una fábrica sería satisfactorio en ese caso, pero para moverse en estos escenarios hostiles el robot necesita al humano”. El hombre y la máquina dividen sus tareas: “El humano pone su cerebro y el robot una habilidad, resistencia y fuerza específicas”.
ASIMO, siéntate
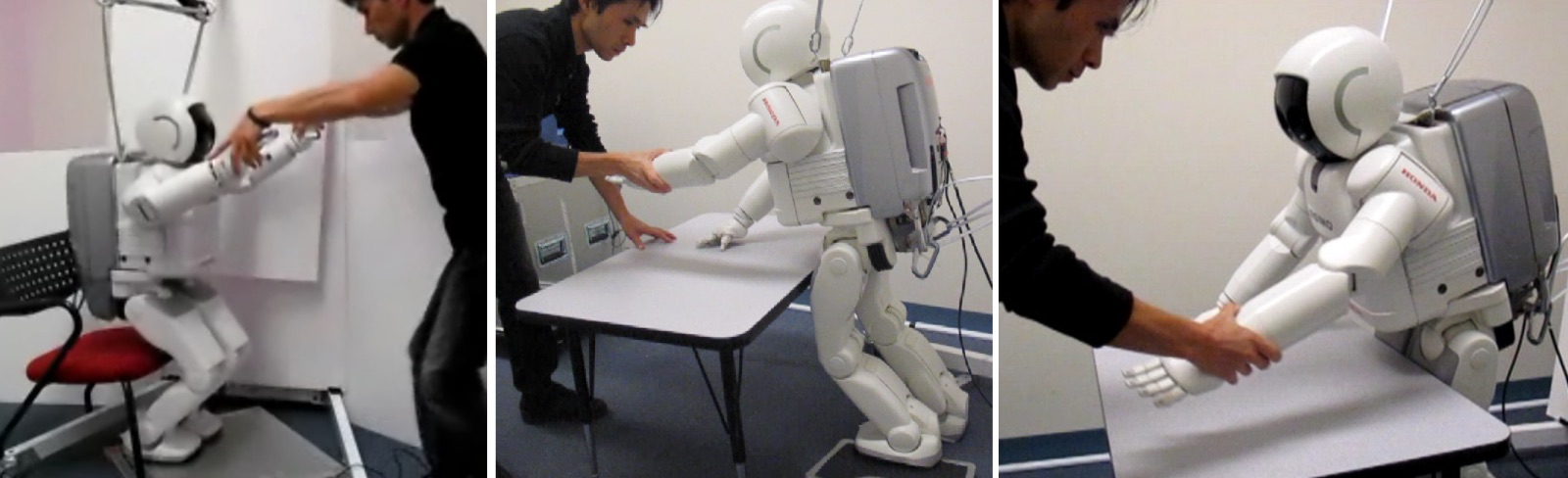
Para ilustrar esta noción, Oussama Khatib nos pone un ejemplo que todos conocemos: Asimo, el robot de Honda. “Todos sabemos que Asimo puede moverse, andar y correr imitando muchas habilidades dinámicas del cuerpo humano. Pero lo que no es tan conocido es que tenía algunas limitaciones. Nosotros le hemos enseñado ahora tareas como abrir una botella y servir líquido cuidadosamente, sin derramar nada. Y también hemos roto la mayor ley que pesaba sobre él: no tocarle. Ahora es capaz de interactuar y se deja guiar de la mano de un compañero humano que le indica por ejemplo, tomándole las manos, que se siente”.

Para construir esa interacción han tenido que pasar muchas cosas, muchos pequeños avances que se aplican ahora a nuevos prototipos. “Ha sido un proceso complicado -relata Khatib-. Reúne aprendizaje de las dinámicas del cuerpo humano, de cómo nosotros aplicamos la fuerza, y lo hemos hecho capturando los movimientos de un modelo humano y codificándolos. Para empujar algo, todo nuestro cuerpo se pone a trabajar de manera eficiente con el fin de ahorrar energía y aplicar la máxima fuerza“.
Para Khatib este es “un problema físico. Calculando todas las variables, matemáticamente, somos capaces de transferir al robot esa habilidad altamente avanzada. Hay que tener en cuenta que si uno mueve un brazo, por ejemplo, el resto del cuerpo le sigue y compensa el movimiento para mantener el equilibrio. El robot también aprende a mantener la estabilidad”. Es la psicomecánica del esfuerzo: “Les enseñamos a cambiar, como hace el humano la manera de apoyar un objeto dependiendo de la inclinación y la rugosidad de la superficie. Eso no se programa, es una habilidad que hay que enseñar matemáticamente”.

Estas habilidades han centrado muchos de los esfuerzos del Stanford Robotics Lab en los últimos años, con avances difícilmente creíbles. “El humano aprende a usar la ventaja mecánica que la estructura del cuerpo ofrece para aplicar la fuerza y modificarla según la tarea que debe realizar. Al robot le enseñamos a moverse en ambientes de multicontacto con el sistema, “whole body control”. Por ejemplo, restringiendo la fricción, aprende a escalar por una chimenea, teniendo en cuenta las variables de las fuerzas involucradas para no resbalar. Y también le mostramos cómo caminar por un lugar pedregoso apoyado en bastones para avanzar. En tiempo real, hemos logrado que analice muchas posibilidades y decida cuál es la más eficiente. Para eso hemos creado un modelo matemático de las fuerzas puestas en juego en cada movimiento y del control de esa fuerza aplicable”.
Sin esos pasos, la exactitud y eficiencia del compañero robótico no sería la óptima. Pero una vez resueltos esos problemas se entró en la materia más compleja, la interacción. “Añadimos el sistema háptico, una vez resuelto el movimiento y el esfuerzo, añadimos el control táctil con sensores que informan al piloto de la resistencia que encuentra en los puntos de torsión. El robot guiado responde a la resistencia de manera precisa, es muy sensible. Aquí hemos podido aplicar muchos años de experiencia“.

¿Cómo fue avanzando esa experiencia? “Primero aprendimos cómo usar un brazo y la interacción de un brazo con humanos -nos cuenta Kathib, mientras nos muestra un vídeo de sus alumnos entablando una “batalla” de espadas de luz con un brazo robótico-. Luego aprendimos a hacerlo con dos. Después le enseñamos cómo deben interactuar ambos brazos entre sí para poder trabajar. Después vino la movilidad, el gran problema de los robots, que es de lo que estamos hablando. Y finalmente la cabeza y, por supuesto, la navegación. Así llegamos a ponerle cuerpo, en el Ocean One se ha sumado todo ese esfuerzo de muchos años“.

Pero así es como ha ido avanzando la tecnología en uno de principales sus centros de gravedad en el mundo: Stanford. Al final del proceso llegó el Ocean One, el primer prototipo de una nueva generación llamada a asumir trabajos muy arriesgados en el fondo marino. En opinión de Oussama Khatib, “lo más complicado del Ocean One ha sido la hostilidad del ambiente sobre la que debemos aplicar el sistema sin perder precisión. Y atender al mismo tiempo a las dinámicas del agua”.
Eso significa problemas mecánicos añadidos: “Los brazos tienen dentro un circuito de aceite muy sensible. La fuerza que aplica en sus manos es muy delicada y se produce con la suma de fuerza de todos los puntos de torsión. Los motores compensan la inercia dependiendo de la resistencia que encuentran. Está todo muy bien equilibrado para aplicar la fuerza justa. En el agua un exceso de fuerza haría perder la estabilidad. Y lo corrige todo en tiempo real para lograr la fuerza final deseada”.

Así que, con este fin también se han desarrollado motores en los puntos de torsión. “El motor aplica su fuerza sobre un sistema de engranajes. Ahí es donde podemos compensar la información que llega de los puntos de torsión. El Ocean One tiene siete puntos en cada brazo más el de las manos. En total son 24 grados de libertad los que tiene este robot”, algo realmente asombroso.
Los grados de libertad, en robótica, explican la cantidad de movimientos diferenciados que una máquina puede hacer. La complejidad añadida a este prototipo es la interacción entre todos ellos para trabajar con la misma exactitud a diferentes presiones, con diferentes materiales, en presencia de corrientes de distinta intensidad y todo ello controlado por un para de controles hápticos un terminales computerizadas.

El “baño inaugural” del Ocean One ha sido en Tolón el pasado 12 de abril. El calendario del proyecto es también asombroso: “Todo empezó en 2012 y se terminó en ensamblar el 29 de agosto pasado. Desde entonces hemos hecho pruebas en la piscina de Stanford, de la que aún no había salido antes de viajar a Francia. Muchos comentaban irónicamente allí: ¿Necesitáis ir a Francia a probarlo? ¡En EEUU tenemos dos inmensas costas! (sonríe) Allí las pruebas acabaron el pasado 9 de marzo, hace apenas un mes“. La visión del robot viajando a los restos de la fragata hundida hace 352 años con casi mil personas a bordo explica perfectamente la necesidad del viaje. La arqueología subacuática se juega su futuro a gran profundidad y sin tecnología eso nunca será posible. Dedicaremos la próxima entrada del blog a demostrarlo.

Comentamos a Oussama Khatib que, a pesar de la tensión por esta misión en Francia, siempre está sonriente. El sonríe más: “¡Es muy importante siempre disfrutar de lo que haces!”
–¿Cree que la literatura y el cine, o los cómics, dan ideas ciertas del mundo de la robótica? Hay demasiados relatos de rebelión de las máquinas y la humanidad sometida.
-El entendimiento que la literatura, el cine y el cómic popular sobre los robots es una cosa. La realidad es otra.
-¿En qué sentido?
-Los robots no vienen a robar nuestros puestos de trabajo, ni deben darnos miedo. Cuando trabajas con robots te das cuenta de que lo que realmente son es, sin duda, una herramienta maravillosa. Como todas las herramientas, si una pieza se rompe, el robot está roto. El ser humano es el único con capacidad de auto reparación. Visto de este modo, el robot solo refleja el interés del humano que está detrás de la máquina.
-En el mundo real también se oyen proyectos de soldados robóticos, y ya tenemos la guerra de drones, máquinas que pueden tomar decisiones que nos asustan.
-Eso está muy bien pensado. Pero sepan que dependen y dependerán del humano para ser efectivos durante mucho tiempo. La Inteligencia Artificial puede ser una opción de computación para cálculos algorítmicos como los programas de ajedrez. Pero los algoritmos también están escritos por seres humanos y si producen resultados, serán los que el humano busca. Así que, para responder a su pregunta, es cierto que si debemos temer a alguien, es al humano que se pone o que está detrás de un robot. Pero no a la tecnología, me parece importante aclarar esto.
–Y qué añade a la presentación de la tecnología, como en el caso del Ocean One -que tendrá muchos otros usos, además del arqueológico-, el hecho de realizarla en un yacimiento?
-Para nosotros esta es una aplicación más de la tecnología que desarrollamos. Es posible que al estar conectado con las humanidades, la historia, las ciencias sociales, sea más atractivo para el público y dé una idea menos fría de lo que la tecnología puede hacer. Pero sin duda la búsqueda de recursos en el lecho marino, o el relevo de operadores humanos en zonas de riesgo, como el mantenimiento de plataformas, cables u oleoductos, son otras aplicaciones que tendrán en un futuro inmediato un impresionante impacto en la sociedad.
Otros temas





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}